
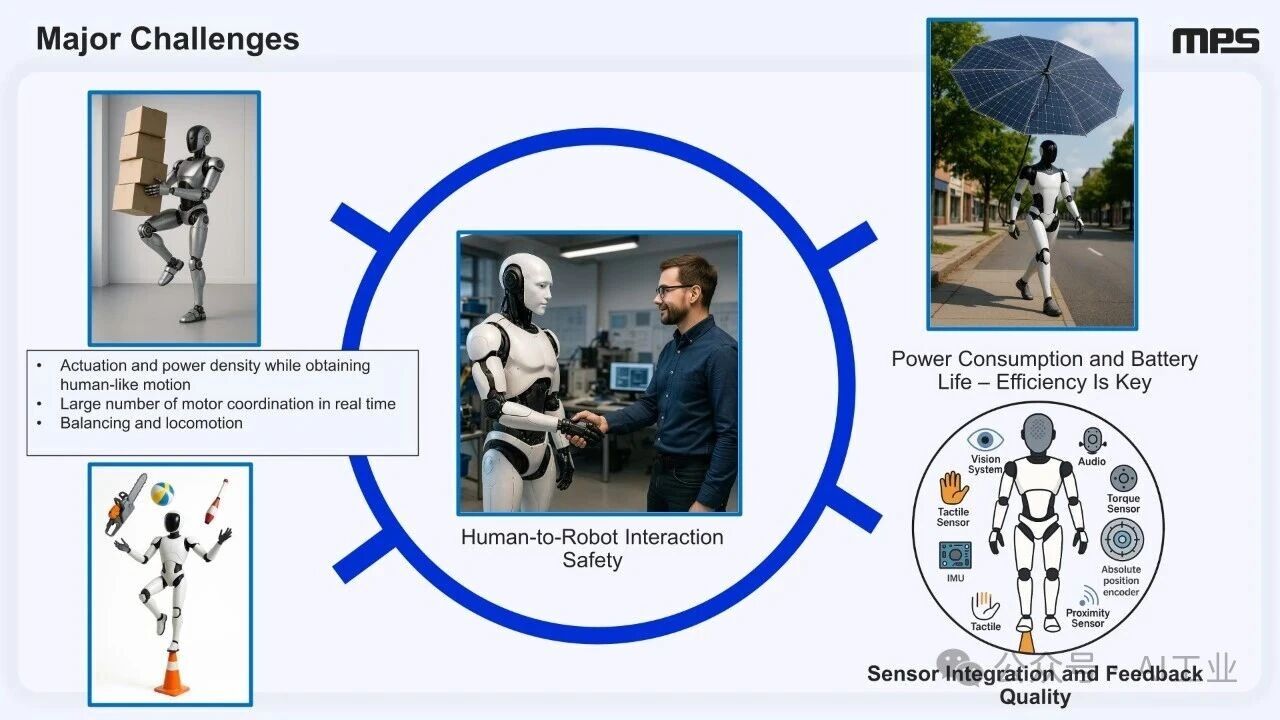
人形机器人的几大核心挑战。左侧强调的是执行器与功率密度、实时多电机协调、平衡与运动控制,也就是机器人既要像人一样运动,又要在有限体积和功耗下实现高动态控制;中间突出的则是人机交互安全,说明机器人真正进入现实场景后,安全性会成为最关键的前提之一;右侧强调功耗与续航,指出效率是延长电池寿命的关键,同时还提到 传感器集成与反馈质量,包括视觉、音频、力矩、触觉、IMU、位置编码器和接近传感器等。人形机器人的难点并不只在“让它动起来”,而是在动力、控制、安全、续航和感知反馈之间实现系统级平衡。
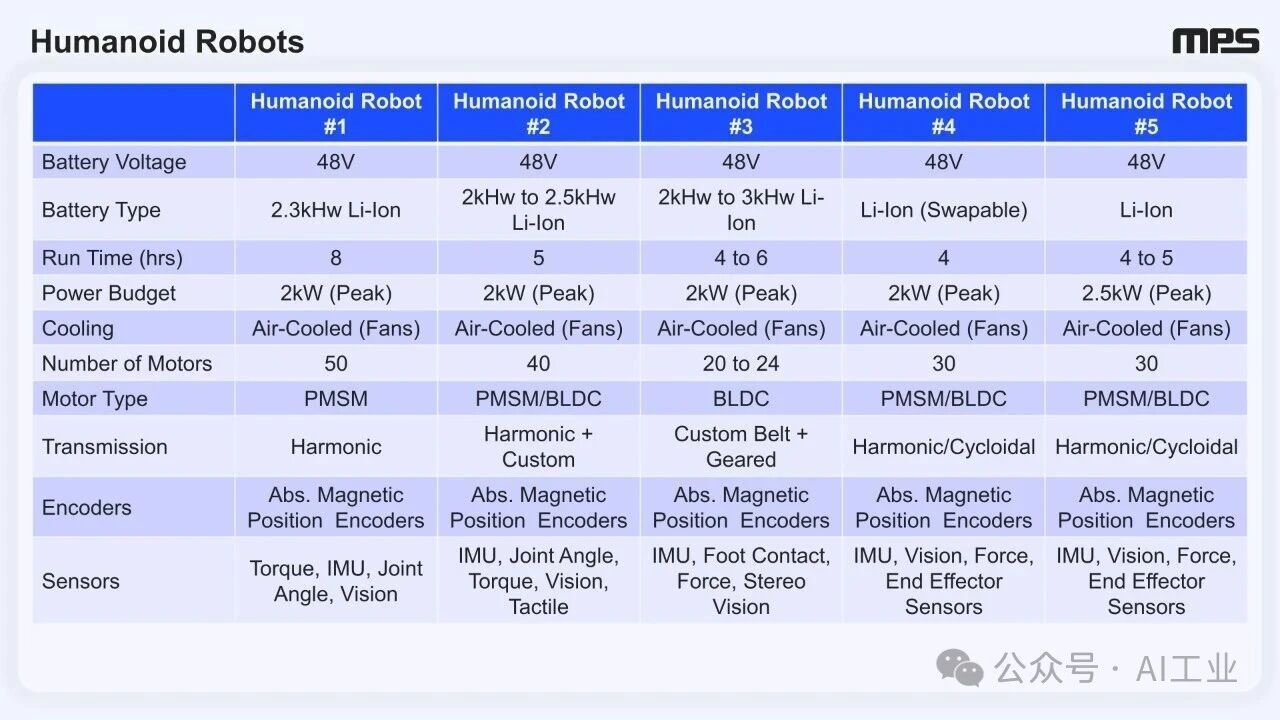
电源、驱动、传动和感知四个层面,对几款人形机器人做了更细的横向对比。整体来看,这些机器人大多采用48V电池平台,电池类型以锂离子电池为主,容量大致在2–3kWh,续航约4–8 小时,峰值功率预算多在2–2.5kW,散热方式普遍采用风冷。执行系统方面,电机数量大约在20–50 个,电机类型主要是PMSM或BLDC,传动则常见谐波、摆线,以及皮带+齿轮等组合方案;编码器基本都采用绝对式磁编码器。传感器配置上,则围绕IMU、关节角度、力矩、视觉、触觉、足底接触力和末端执行器传感器展开。当代人形机器人在底层硬件架构上已经形成一些共性,比如48V平台、锂电池、风冷、多电机与多传感器融合,但不同厂商在电机数量、传动结构和传感器组合上仍有明显差异。
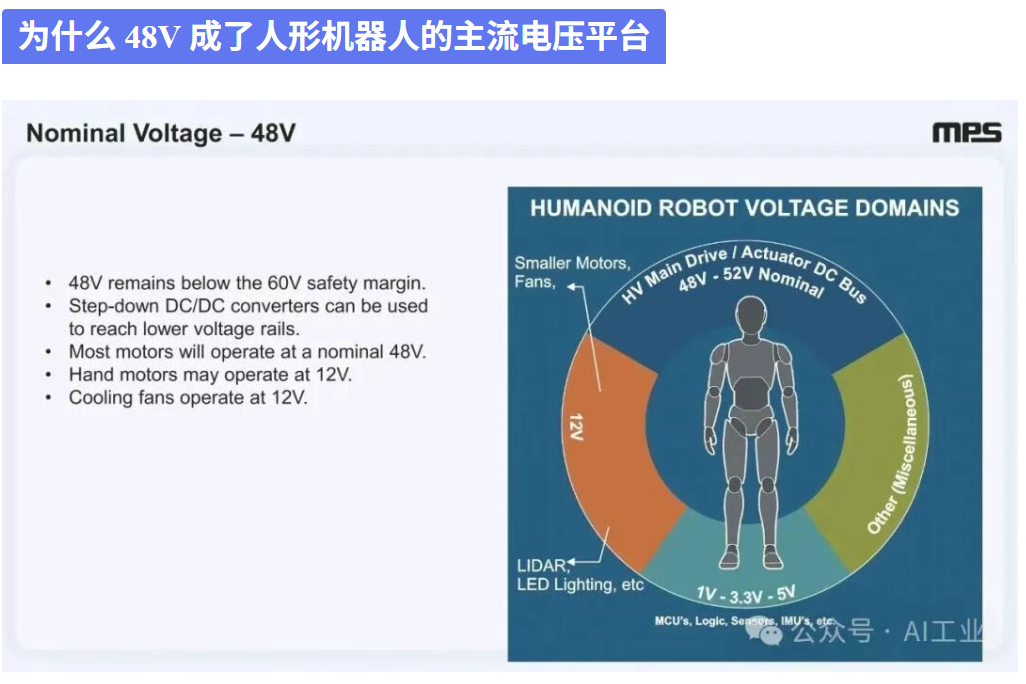
人形机器人的标称电压为什么多为48V。核心原因在于,48V仍低于60V的安全门槛,因此在安全性和功率能力之间取得了较好平衡;同时,也可以通过降压 DC/DC 转换器进一步得到更低电压的供电轨,比如1V、3.3V、5V供给 MCU、逻辑器件、传感器和 IMU,12V供给手部电机、风扇、激光雷达和照明等,而主驱动/执行器直流母线则通常工作在48V–52V。48V 正在成为人形机器人主驱系统的主流电压平台,再配合多路降压,形成整机不同模块的电压域分配。
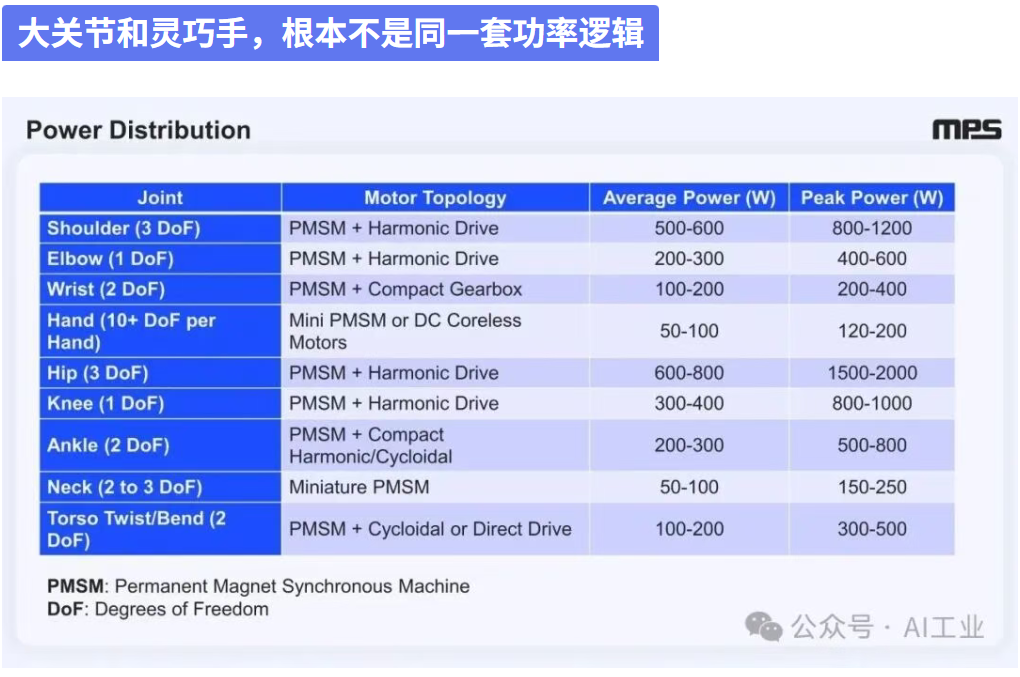
人形机器人不同关节的功率分配。从表中可以看出,肩、髋、膝等大关节通常是整机中最耗电的部分,普遍采用PMSM + 谐波减速器方案,其中髋关节的平均功率约600–800W、峰值功率可达1500–2000W,是功率需求最高的部位之一;肩关节平均约500–600W、峰值800–1200W,膝关节平均约300–400W、峰值800–1000W。相比之下,肘、腕、踝、颈部、躯干等部位功率需求更低,常见范围在50–300W 平均功率、150–800W 峰值功率;而灵巧手单手虽然自由度很多,但单个驱动单元功率通常更小,多采用微型PMSM或空心杯直流电机。人形机器人并不是所有关节平均分配功率,而是下肢和大关节承担主要功率消耗,小关节和手部则更强调小型化与精细控制。
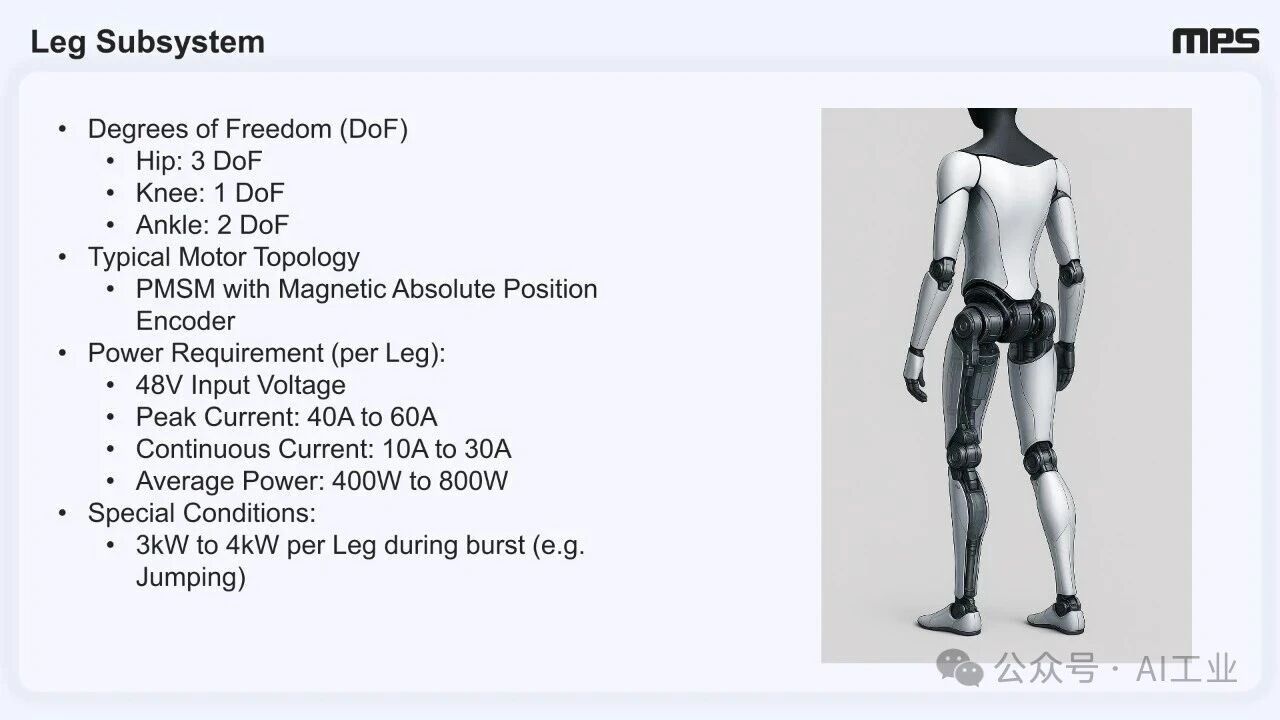
人形机器人的腿部子系统。从自由度分配看,单条腿通常由髋关节 3 自由度、膝关节1自由度、踝关节2自由度组成;典型电机拓扑则是采用PMSM 永磁同步电机,并配套磁式绝对位置编码器。在供电与功率需求上,单腿一般基于48V输入电压工作,峰值电流约40A–60A,持续电流约10A–30A,平均功率约 400W–800W。同时页面还特别指出,在跳跃这类瞬时高爆发场景下,单腿功率可能短时提升到 3kW–4kW。腿部系统既是人形机器人功率需求最高的部分之一,也是对电机、驱动和瞬时爆发能力要求最严苛的核心子系统。
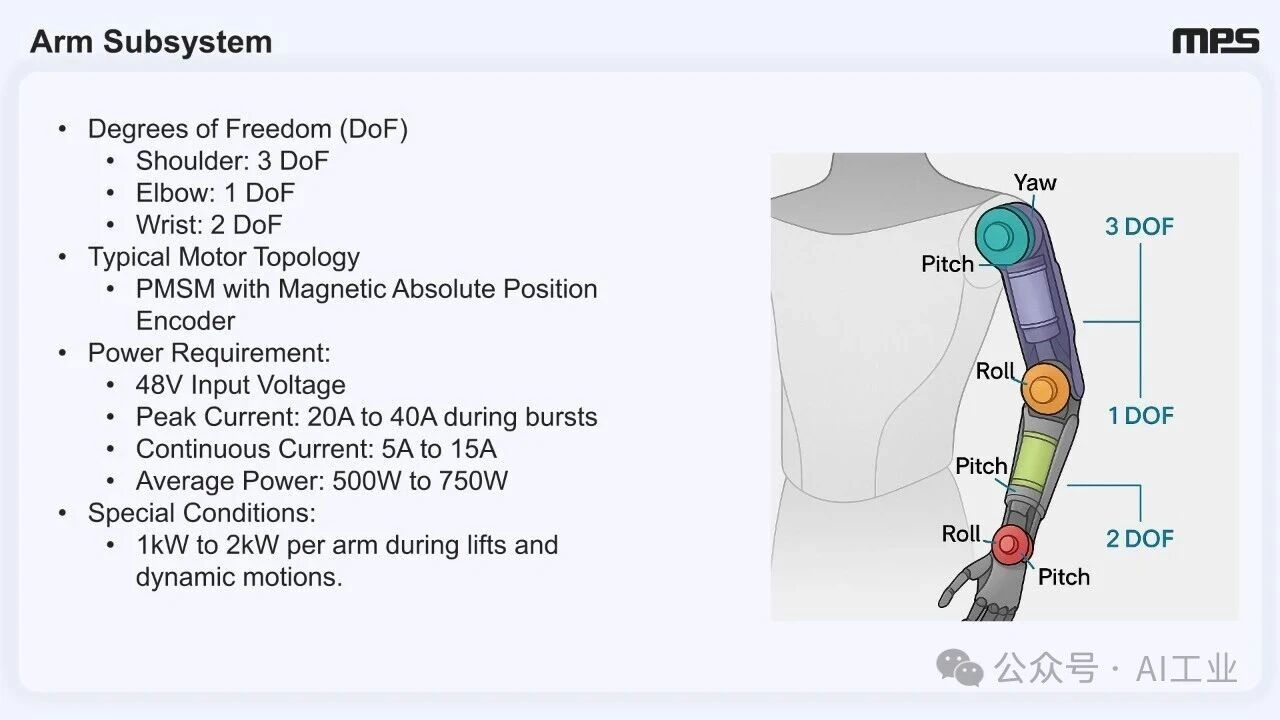
人形机器人的手臂子系统。从自由度分配看,单侧手臂通常由肩关节3自由度、肘关节1自由度、腕关节2自由度组成;典型电机拓扑一般采用PMSM永磁同步电机,并配套磁式绝对位置编码器。在供电与功率需求上,手臂系统通常基于48V输入电压工作,突发峰值电流约 20A–40A,持续电流约 5A–15A,平均功率约 500W–750W。页面还特别指出,在提举重物和动态挥动等场景下,单臂功率可能短时提升到 1kW–2kW。手臂系统既要保证多自由度运动灵活性,又要兼顾负载能力和动态响应,因此对驱动、控制和瞬时功率输出都有较高要求。

人形机器人的手部子系统。从自由度配置看,单根手指在屈伸上通常有3个自由度,手指外展/内收约1个自由度,拇指则通常有4–5 个自由度;如果手腕不归在手臂子系统中,还会额外包含2个自由度。典型电机拓扑一般采用无铁芯BLDC电机,并配套磁式绝对位置编码器。在供电与功率需求上,手部系统通常工作在12V–48V 输入电压下,突发峰值电流约 5A–8A,持续电流约 1A–5A,平均功率约 50W–100W。灵巧手虽然单个执行单元功率不大,但自由度高、结构紧凑、控制精细,因此对微型电机、编码器集成和空间利用率要求非常高。
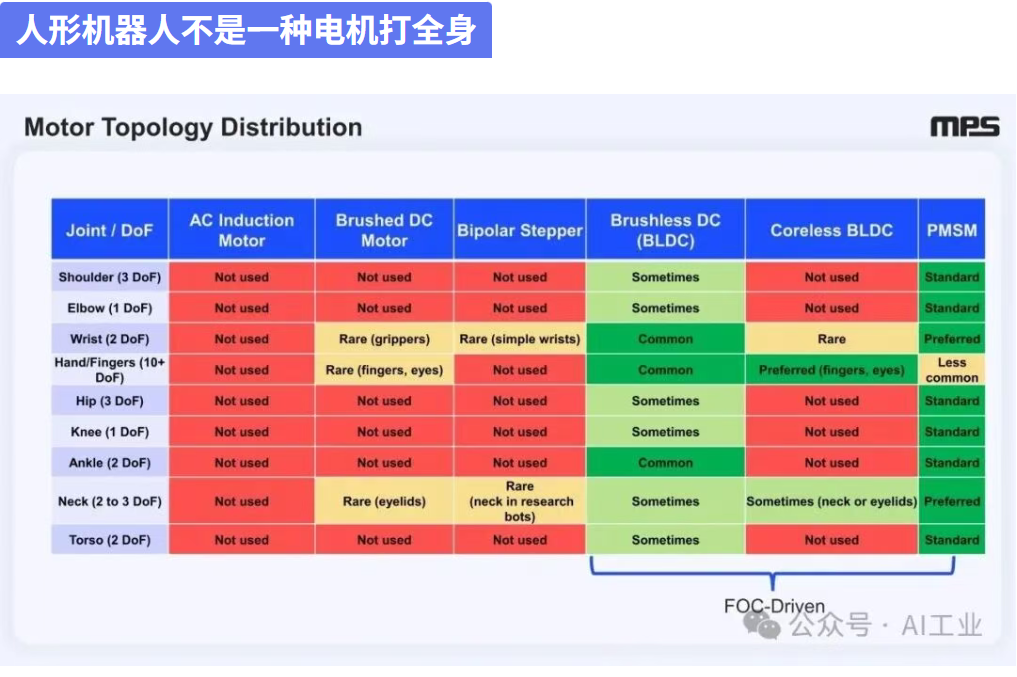
不同关节位置对应的电机拓扑分布。整体结论非常明确:在人形机器人里,PMSM 永磁同步电机是大关节的标准方案,尤其常见于肩、肘、髋、膝、踝和躯干;BLDC无刷直流电机也有较高使用率,特别是在手腕、手部和踝部这类更强调紧凑性与响应速度的部位;而无铁芯 BLDC则更适合手指、眼部、颈部这类小型、高灵巧度场景,因此在这些位置常被列为优选。相比之下,交流感应电机、有刷直流电机和双极步进电机在人形机器人主流关节中基本很少使用,只在夹爪、简化手腕、眼睑或研究型样机等少数场景偶尔出现。页下方还强调,这些主流方案大多属于FOC(磁场定向控制)驱动范畴。人形机器人的电机选型并不是“一种电机打全身”,而是以 PMSM 为主干、BLDC 为补充、无铁芯 BLDC 负责末端精细执行的分层配置。
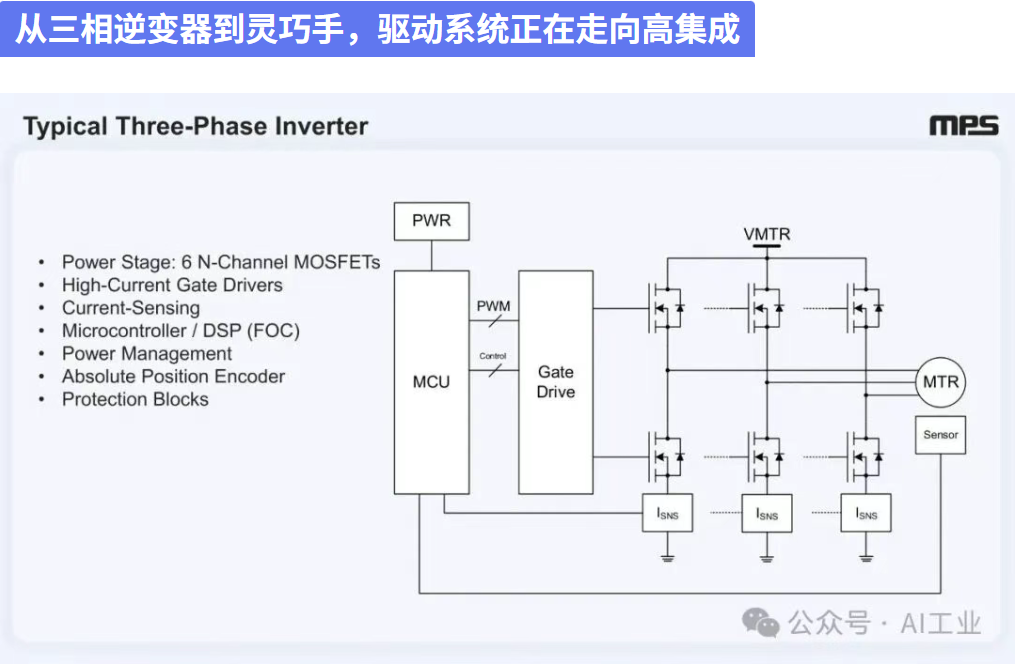
典型三相逆变器。整体来看,它由6个N沟道MOSFET组成的功率级、高电流栅极驱动器、电流采样模块、负责FOC 控制的微控制器/DSP、电源管理模块、绝对位置编码器,以及保护电路共同构成。
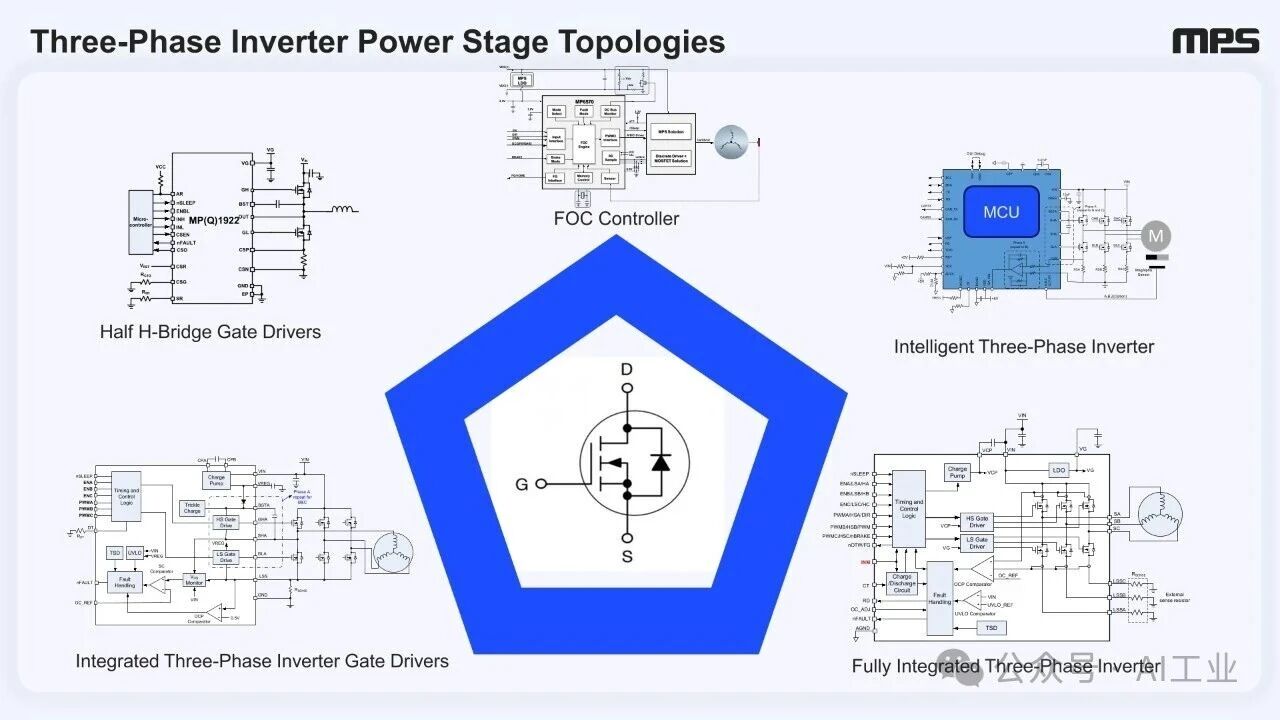
三相逆变器功率级的几种典型拓扑。从左上到右下,方案的集成度是在逐步提升的:最基础的是半桥栅极驱动器,需要外接更多分立功率器件来组成完整三相桥;再往上是配合FOC控制器的方案,由控制器负责磁场定向控制,驱动外部功率级工作;右上角的智能三相逆变器,则把 MCU、驱动和部分控制功能进一步整合在一起;左下角的集成式三相逆变器栅极驱动器,是在三相驱动层面做更高集成;右下角的全集成三相逆变器,则把驱动与功率级尽可能收进单芯片或高度集成方案里。中间的图标本质上强调,所有这些拓扑最终都围绕同一个核心器件——功率开关管——展开。三相逆变器可以从分立方案一路演进到高度集成方案,而集成度越高,通常越有利于缩小体积、简化设计,并适配机器人这种对空间和效率都很敏感的场景。

机器人灵巧手解决方案。它的核心特点包括:采用FOC磁场定向控制,集成角度传感器,整体尺寸非常小,直径仅9mm、厚度约6.5mm;输入电压范围为5V–18V,最大支持2A相电流,电机最高转速可达60000rpm。通信方面支持RS485接口和Modbus 协议,并提供可配置保护功能,如欠压锁定(UVLO)和过流保护(OCP);开关频率最高可配置到 80kHz,角度传感分辨率最高可达14位,同时采用刚柔结合PCB结构。页面还给出了所用芯片组合,包括MP6570、MP6543H、MP6710、MP2015A,以及连接器定义:RS485_A / RS485_B 用于通信,UVW连接电机三相绕组,GND为电源地,VIN为5V–18V直流输入。MPS正在把灵巧手驱动做成超小型、高集成的一体化关节/指驱模组,面向高密度、紧凑型手部执行系统。
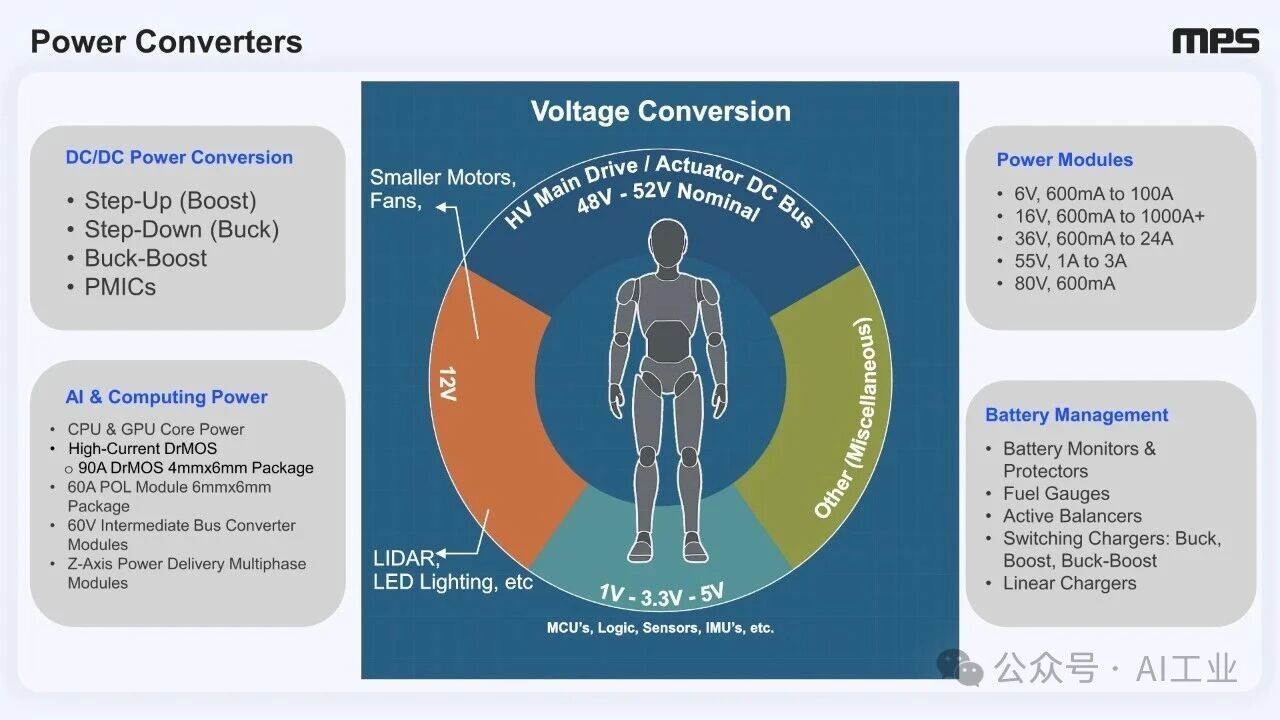
机器人整机里的电源转换体系。核心意思是:人形机器人通常以48V–52V作为主驱动/执行器直流母线,再通过各类DC/DC 电源转换 把电压分配到不同模块,例如12V供给较小电机、风扇、激光雷达和照明等,1V / 3.3V / 5V 则供给MCU、逻辑器件、传感器、IMU等低压电子系统。左侧列出了常见的电源转换类型,包括升压(Boost)、降压(Buck)、升降压(Buck-Boost)和PMIC;同时还提到AI与计算电源,比如 CPU/GPU 核心供电、高电流 DrMOS、中间总线转换器和多相供电模块。右侧则补充了功率模块的不同电压/电流覆盖范围,以及电池管理所需的关键功能,包括电池监控与保护、剩余电量计、主动均衡、开关充电器和线性充电器。人形机器人并不只是一个48V系统,而是一个由主母线、电源转换、计算供电和电池管理共同组成的多电压域电源架构。
MPS的电机驱动方案可以为人形机器人提供较完整的电机控制平台,支持各类三相 BLDC与PMSM 电机,并适配先进的FOC(磁场定向控制)算法;同时,其产品组合还能提供电流测量与保护能力,通过多种电流检测拓扑来兼顾精度、可靠性与安全性。在位置反馈方面,MPS 还提供基于磁式霍尔绝对位置编码器的高分辨率闭环反馈,以满足人形机器人对精度和响应速度的要求。最后,在功率级实现上,MPS 提供了从分立式三相逆变器设计到全集成智能驱动器,再到交钥匙电机模组的多层次方案,目的是帮助客户更快完成产品开发和落地。……
 京公网安备11010502056287号
京公网安备11010502056287号